Les Moteurs
Robin DUMONTIER - 26/02/2014
Les moteurs sont des composants majeurs du robot puisqu'ils permettent son déplacement en translation mais également en rotation grâce à la différence de vitesse entre les deux moteurs.
Caractéristiques des Moteurs
Les deux moteurs utilisés sont les moteurs du chariot de golf. En effet, ceux-là ont une puissance importante et sont couplés à un réducteur 1/25 qui permet de réduire la vitesse angulaire du moteur. Leur utilisation dans le cadre de notre projet est assez simple à mettre en oeuvre et permet de réduire les coûts (gratuits). Ces deux moteurs ont une tension nominale de 12 V correspondant à une vitesse angulaire de 461 rad.s-1. Pour notre robot, seul un sens de marche sera possible. Ceci évite d'utiliser un pont en H, très coûteux lorsqu'ils doivent supporter une forte intensité électrique.
Fonctionnement des Moteurs
Description
Les moteurs seront commandés par des transistors à effet de champ à grille métal-oxyde (MOSFET) qui se saturent si il y a une tension minimale à sa grille.
En sachant que la vitesse nominale des moteurs est 4400 RPM, que le réducteur est de 1/25 et que le rayon des roues utilisés est de 0,198 m, il est claire que la vitesse linéaire du robot serait trop importante, il a donc fallu trouvé un moyen de réduire la vitesse angulaire du moteur, la solution choisie est la modulation de largeur d'impulsion (MLI) qui permet d'alimenter le moteur avec un signal carré à 10 kHz de fréquence. Pour appliquer la MLI, il est nécessaire de calculer un alpha qui correspond au rapport entre la phase d'alimentation du moteur et la période temporelle du signal: α=Th/T, or ce rapport est proportionnelle au rapport entre la vitesse angulaire du moteur et sa vitesse angulaire maximale donc: α = ω / ω max = ω roue*25 / ω max=25*(V linéaire/R roue) / ω max
Or nous voulons que le robot se déplace à 2 km.h-1 soit 0,556 m.s-1.
Donc α=25(0,556/0,198)/461=0,15 ,cependant nous nous sommes rendus compte expérimentalement que α était plutôt proche de 0,20/0,25, ce qui est réalisable contrairement à un α de 0,15. En effet une MLI de rapport 0,15 ne permet de lancer le moteur lorsque le robot est chargé.
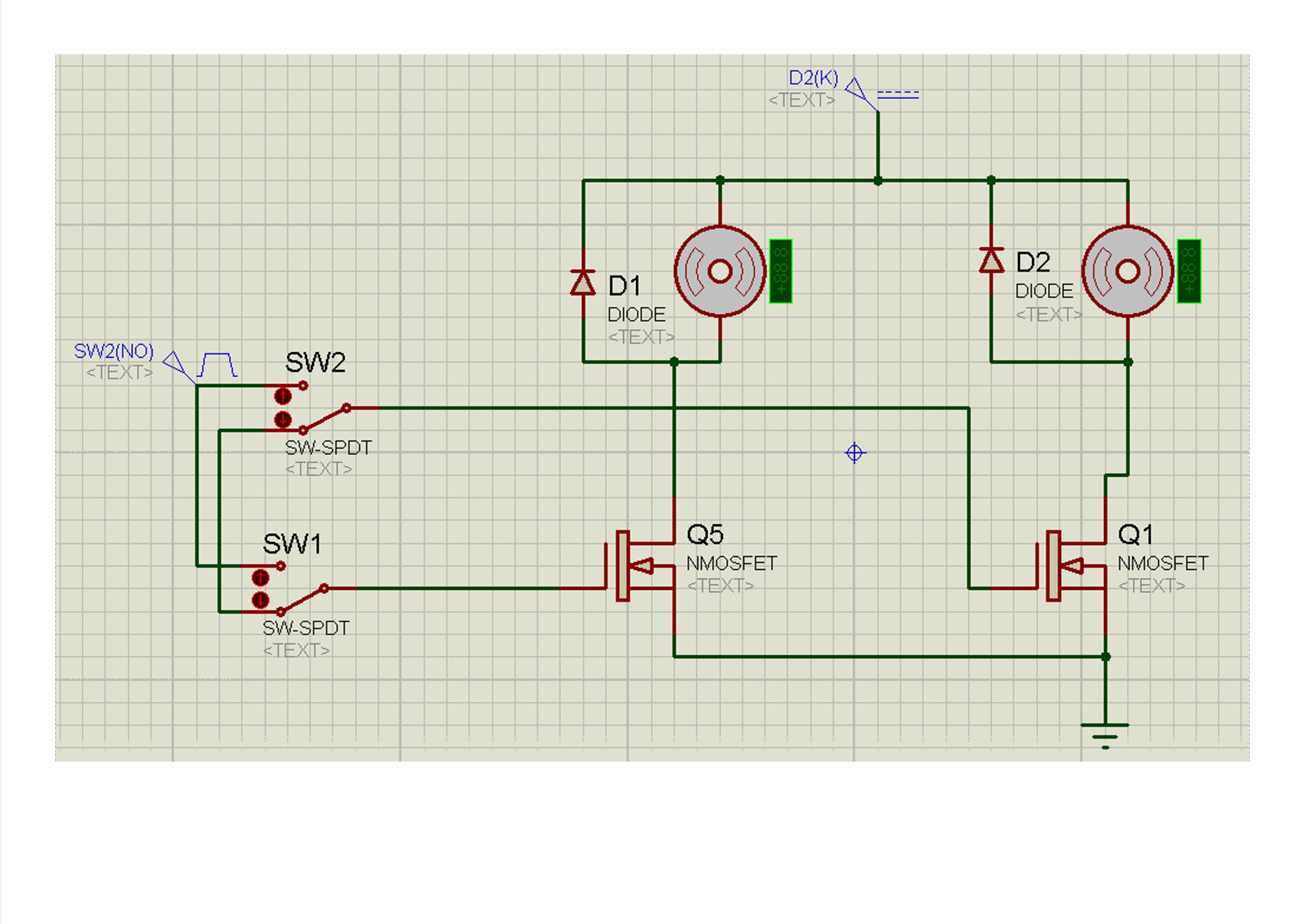
Simulation et Schéma de Câblage
Voici à présent le schéma de câblage des moteurs, les interrupteurs couplés au générateur d'impulsion simulent la MLI.