Présentation générale
Lucas WILLEMS - 18/02/2014
Recherche du sujet
Pour commencer, il nous a fallu trouver un sujet. Après quelques midis de discussion, j'ai proposé l'idée d'un robot traceur de plans architecturaux, c'est à dire un robot qui tracerait, au sol, un plan (celui d'une maison ou autre) rentré par l'utilisateur au préalable.
Pourquoi ce robot ?
Lors de la construction d'une maison, l'une des premières étapes est le piquetage du terrain, ce qui revient à planter des piquets au sol pour délimiter la surface à décaisser (= enlever de la terre et niveler pour pouvoir mettre les fondations). Cette étape est très importante car, si un terrain est mal piqueté, les fondations peuvent ne pas être au bon endroit, mais aussi le décaissage peut être trop important et donc revenir plus cher.
Le piquetage est un travail manuel qui demande beaucoup de précision et qui peut être long si on est tout seul ou ne possède pas de bon matériel comme un théodolite, en général, assez onéreux.
Le but de notre robot est donc de simplifier cette étape de la construction en essayant de concevoir un outil qui automatise le tracé de plan et donc qui permet de faire gagner du temps à l'utilisateur, tout en restant précis.
Élaboration du cahier des charges
Après avoir trouvé notre idée et en avoir obtenu une vision assez claire, nous avons du élaborer le cahier des charges de notre robot que voici :
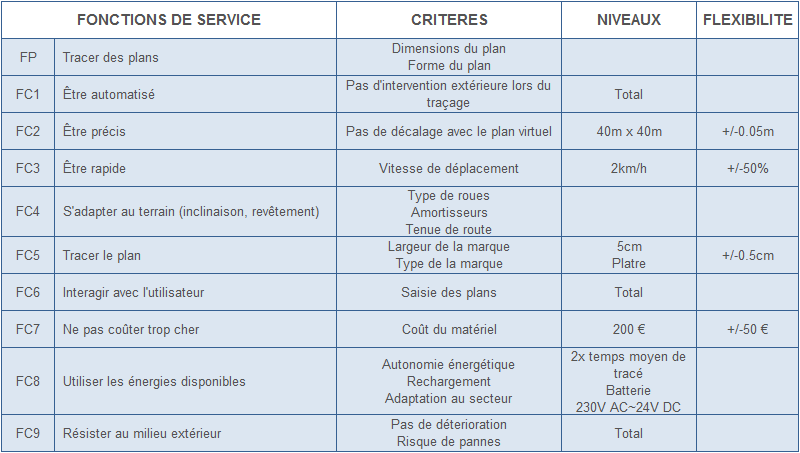
pour déterminer la fonction principale et les fonctions contraintes.
Répartition des tâches
Une fois le cahier des charges élaboré, nous avons dû nous répartir les tâches pour traiter de manière plus efficace les différentes contraintes :
- Lucas : la programmation => gestion de l'automatisation du robot
- Robin : l'électricité => schéma de câblage et réflexion autour des composants à utiliser
- Alessandro et Aurore : la mécanique => réalisation des maquettes numériques du robot
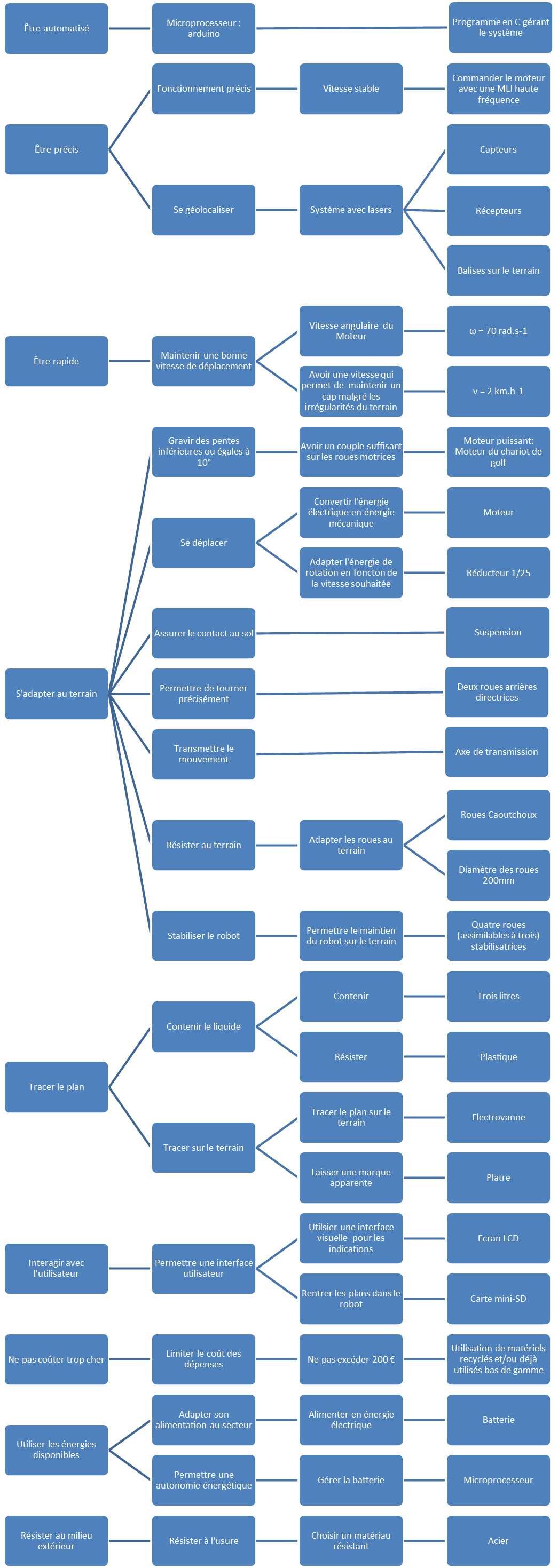
Réalisation du diagramme FAST
Il nous a ensuite fallu élaborer le diagramme FAST que voici :